
Tipos de receptores GNSS
Existen tres tipos de receptores GNSS, los receptores que trabajan solamente con códigos para la determinación de la posición, los receptores que tiene capacidad de rastreo de una onda del espectro radioeléctrico y los receptores que tiene capacidad de rastreo de dos ondas del espectro radioeléctrico.
Cada uno tiene sus características propias, por ejemplo, los receptores que únicamente determinan la posición a partir del código, son menos precisos que los receptores de una o doble frecuencia. Este tipo de receptores se denominan comúnmente navegadores, son muy utilizados para el esparcimiento al aire libre, deportes, navegación, pesca o cualquier actividad que requiera definir la posición sobre la Tierra, con un rango no mejor a 3m de precisión. NO es recomendable el uso de este tipo de equipo para los levantamientos topográficos y geodésicos.

Por su parte, los receptores de una frecuencia tienen la capacidad de alcanzar mejores precisiones que los navegadores, esto se logra en función del método de levantamiento utilizado y el tiempo de rastreo. Son recomendables para realizar trabajos topográficos que no requieran de una precisión muy alta.
En cambio, los receptores de doble frecuencia permiten recibir mayor cantidad de señales de los satélites y alcanzan precisiones muy altas, tanto, en la posición horizontal como vertical. Claro está, que estas precisiones están condicionadas al método de levantamiento establecido, el tiempo de rastreo de las señales y las condiciones del entorno al punto de observación.

Las ventajas de los receptores de doble frecuencia son:
- Los tiempos de rastreo son más cortos al recolectar los datos necesarios para alcanzar las precisiones establecidas.
- Permite observar líneas base más extensas y con muy buena precisión.
- Permiten la eliminación de errores.
La importancia de la cantidad de canales en los receptores GNSS
Una característica particular de los receptores es la capacidad de recepción de señales, las cuales están condicionadas por los canales. Cada canal tiene la posibilidad de recibir una señal de cada satélite, por lo tanto, un receptor de doble frecuencia debe tener disponibilidad de 4 canales para rastrear un satélite. Es decir, si el mínimo de satélites rastreables para un levantamiento son 4 satélites con un receptor de doble frecuencia, el receptor debe disponer de 8 canales como mínimo.
La precisión de un levantamiento con receptores GNSS
La precisión de un levantamiento durante el tiempo de rastreo con GNSS depende de:
- El tipo de receptor a utilizar.
- La precisión de la estación base.
- El número de satélites visibles.
- La geometría de los satélites.
- Las condiciones atmosféricas.
- La cantidad del tiempo de rastreo.
- Las obstrucciones de la señal de satélite.
- El número de observaciones redundantes.
- El software empleado para realizar el postproceso.
Obstrucciones de la señal del satélite
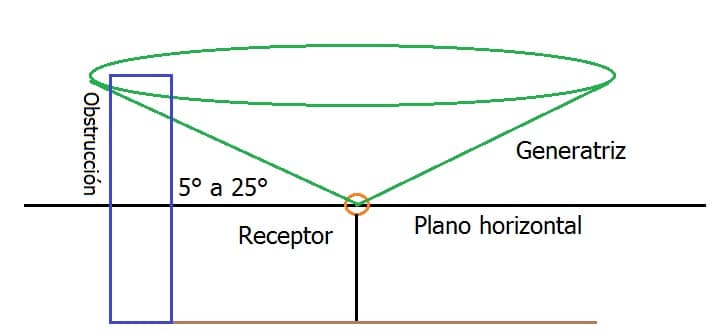
Las obstrucciones son aquellos elementos que interrumpen la señal emitida por los satélites que serán recibidas por los receptores. En el momento de establecer la posición del receptor, es importante realizar una revisión en sitio de la existencia de elementos que interrumpan la señal, esto se logra a partir de la implementación de la máscara de observación.
La máscara de observación es un cono cuyo vértice está ubicado en el receptor y el eje coincide con la vertical del sitio. Se recomienda que el ángulo entre el plano horizontal del sitio y la generatriz del cono se encuentre entre los 5° y 25°, este valor dependerá de las especificaciones técnicas del levantamiento.
Una pérdida de ciclo es la pérdida de señal durante una sesión de rastreo. Las razones por las cuales se presenta la pérdida de ciclo son:
- Obstrucciones presentes en la máscara de observación.
- Una baja intensidad de señal del satélite
- Un procesamiento incorrecto de la señal
Receptor Base
El receptor base o de referencia es una antena parte del segmento usuario la cual se ubica en un vértice medido previamente al cual se determinan las coordenadas. Se debe configurar con anterioridad el rol que tomará el receptor en el levantamiento, ya sea como receptor de la base o como receptor móvil.
La función del receptor en la estación base es determinar de manera muy precisa la distancia a los satélites y definir la posición calculada y la posición medida. La diferencia entre ambas posiciones es conocida como correcciones y serán transmitidas por medio de señales de radio a los móviles involucrados en el levantamiento cuando es en tiempo real o se incluirán al levantamiento cuando se realice el post-procesamiento.
Receptor Móvil
El receptor móvil o Rover cuenta con un dispositivo para recibir y emitir señales de radio por medio del cual se reciben las correcciones desde el receptor de la base, cuando se decida realizar el levantamiento en tiempo real.
El receptor móvil calcula la distancia a los satélites, a esta distancia se le aplica las correcciones determinadas por el receptor base. Esto permite mejorar la precisión de la posición del punto coordinado.
Varios receptores móviles pueden recibir correcciones de un único receptor base.
Velocidad de la época
La velocidad de la época es el intervalo de tiempo que se configura en el receptor para recolectar muestras de datos transmitidos por el satélite. Esto busca economizar capacidad de almacenamiento en los procesadores de los receptores debido a la gran cantidad de información que transmite el satélite.
La recolección de los datos puede ser en intervalos de tiempo de 1, 2, 5, 10, 15 o 30 segundos.
Ambigüedades
En las mediciones con receptores GNSS y utilizando la fase portadora se logra eliminar los errores del reloj y es posible determinar el número entero y fracciones de longitudes de onda ocurridas en la trayectoria de la señal entre el satélite y el receptor.
El problema radica en que existen muchas combinaciones posibles de esa cantidad de longitudes de onda y fracciones, por lo que la solución es ambigua. Es por medio de procesos estadísticos que se logra definir la solución más probable.
Para comprender la resolución de ambigüedades debemos de reconocer que en cada señal recibida de un satélite se proyecta un círculo que define la posición aproximada del punto, como sucede con el posicionamiento diferencial por código.
Ahora como las ambigüedades obedecen al comportamiento de las ondas portadoras, este círculo mostrará líneas imaginarias equidistantes perpendiculares a la trayectoria de la señal del satélite. La distancia en esas líneas imaginarias es la longitud de onda o fracción de la longitud de onda.
Al ingresar una segunda señal de satélite se presentarán nuevas líneas imaginarias con una orientación distinta y generará intersecciones que serán los valores más probables de la posición.
Con la recepción de una tercera y cuarta señal de satélite se disminuirá la cantidad de puntos donde se intersecan los cuatro tipos de líneas. Al cambiar la época y por ende la posición de la constelación permitirá finalmente lograr obtener la solución más probable de la posición del punto.
Diferenciación individual
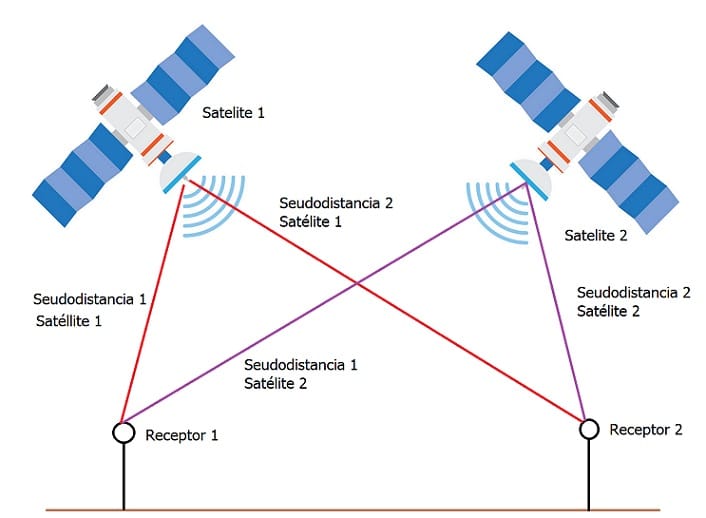
La diferenciación individual busca restar las observaciones de seudodistancia simultáneas entre los dos receptores a un satélite. El resultado permite eliminar el error del reloj del satélite y los errores atmosféricos.

Diferenciación doble
La diferenciación doble busca determinar las diferencias de observaciones de seudodistancia simultáneas entre los dos receptores a dos satélites. En este caso el método elimina el error del reloj del satélite.
Diferenciación triple
La diferenciación triple busca determinar las diferencias de observaciones de seudodistancia simultáneas entre dos diferencias dobles para dos momentos distintos del levantamiento. Este método elimina la ambigüedad y solamente se mantienen las diferencias en las mediciones de la desviación de fase y las distancias geométricas. Además, elimina las pérdidas de ciclos durante una sesión.

Este tipo de método de levantamiento es muy utilizado para redes geodésicas, estudios geodinámicos o levantamientos de muy alta precisión. Tiene la limitación de ser lento y ocupar largas sesiones de rastreo. Los receptores se ubican en los vértices y no se desplazan por el tiempo de rastreo de la sesión de observación.
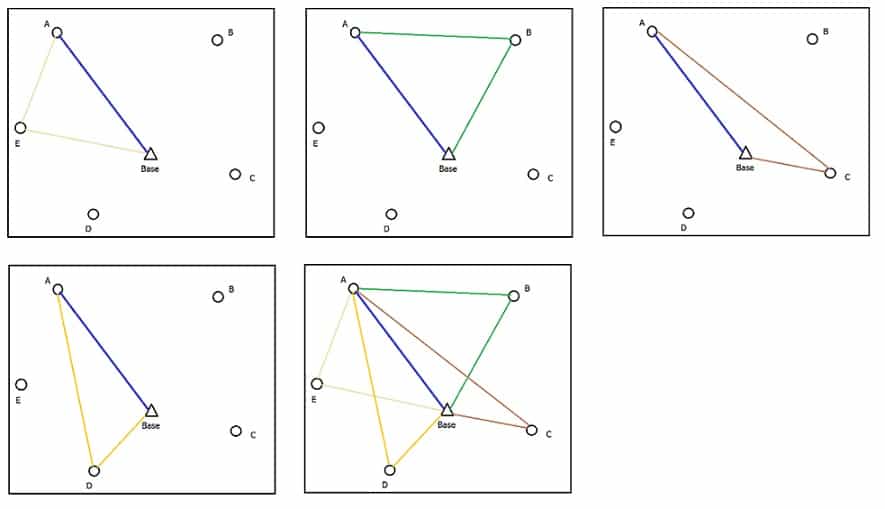
El procedimiento consiste en tener dos o más receptores, un receptor asumirá el rol de base y se ubicará en un punto con coordenadas previamente conocidas. Los otros receptores serán los móviles y se ubicaran en vértices que no se conocen las coordenadas. Es necesario que todos los receptores estén configurados con la misma velocidad de la época. La velocidad de la época normalmente se utiliza a 15, 30 o 60 segundos.
Se realizará una primera sesión de observación de manera simultánea, que tenga cada receptor rastreo a por lo menos cuatro satélites durante mínimo una hora. Finalizando la sesión de observación se mantiene un receptor en el vértice con coordenadas conocidas el cual asumirá el rol de base. Se trasladan los otros receptores a otros vértices de coordenadas desconocidas para realizar la segunda sesión de observaciones. El proceso se repite hasta completar todos los vértices contenidos en la red geodésica y las líneas base formen figuras geométricas cerradas.
Una vez que se ha logrado obtener suficiente información los receptores se apagan.
El tiempo de rastreo depende de la longitud de la línea base, el tipo de receptor, la precisión requerida, la resolución de ambigüedades, velocidad de la época, el GDOP y el número de satélites rastreados, a mayor distancia se requiere mayor cantidad de tiempo de rastreo.
Es recomendable redundar las observaciones de las líneas base para verificar los resultados obtenidos, lo que quiere decir que se deben realizar dos sesiones de observaciones a cada vértice de coordenadas desconocidas.
El método estático radial un receptor se ubica en un vértice con coordenadas conocidas previamente el cual asumirá el rol de base y el otro receptor asumirá el rol de móvil, lo cual le permitirá desplazarse libremente en los vértices con coordenadas desconocidas.
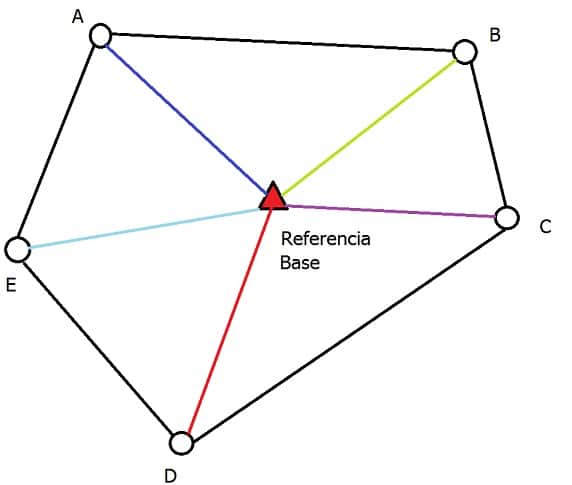
Otra forma de posicionar vértices es utilizar tres receptores, dos receptores se ubican en puntos de coordenadas conocidas y el tercer receptor se ubicará en los vértices de coordenadas desconocidas. Ello formará una figura geométrica al finalizar la ocupación de todos los vértices. Recordar la necesidad de redundar los datos para eliminar errores por lo tanto se requerirá realizar la ocupación de los vértices dos veces.

Podría utilizarse esta otra forma de ocupación de vértices utilizando tres receptores donde un receptor se ubicará en el vértice con coordenadas conocidas y los dos receptores en los vértices de coordenadas desconocidas. En este caso cada sesión de observación se realizará en triángulos cuyos vértices serán ocupados por cada receptor.


Posicionamiento relativo estático rápido
Este método es utilizado para redes de control geodésico locales, o densificación de redes de orden inferior, con líneas máximas de hasta 20 km. Solamente se puede utilizar con receptores de doble frecuencia. Este método es similar al levantamiento estático, solo que un receptor se mantiene en la estación base y los otros receptores se desplazan a los vértices de coordenadas desconocidas. La velocidad de la época se suele configurar de 1 a 3 segundos.
Cada cambio que se hace sucesivamente de vértice, se realiza una sesión de observación, estas sesiones de rastreo son de menor duración que las del posicionamiento relativo estático.
El periodo de rastreo para el receptor móvil depende de la longitud de la línea base y el GDOP.
Levantamientos seudo-dinámicos
Este método requiere un mínimo de dos receptores, donde el receptor base se mantiene durante todo el levantamiento en el vértice de control y el otro receptor se posiciona en los vértices de coordenadas desconocidas.
En este caso, el receptor móvil realizará dos sesiones de observación en cada vértice, en un tiempo relativamente corto y el lapso entre el rastreo de la primera sesión y la segunda sesión debe ser aproximadamente de una hora, lo que se traducirá en una fortaleza geométrica de las observaciones.
Una desventaja es la reocupación de los vértices de coordenadas desconocidas y el lapso de tiempo entre las dos observaciones, lo cual, requiere de una planeación estratégica para lograr maximizar el tiempo del levantamiento, contemplando los desplazamientos y la puesta de operación de los receptores.
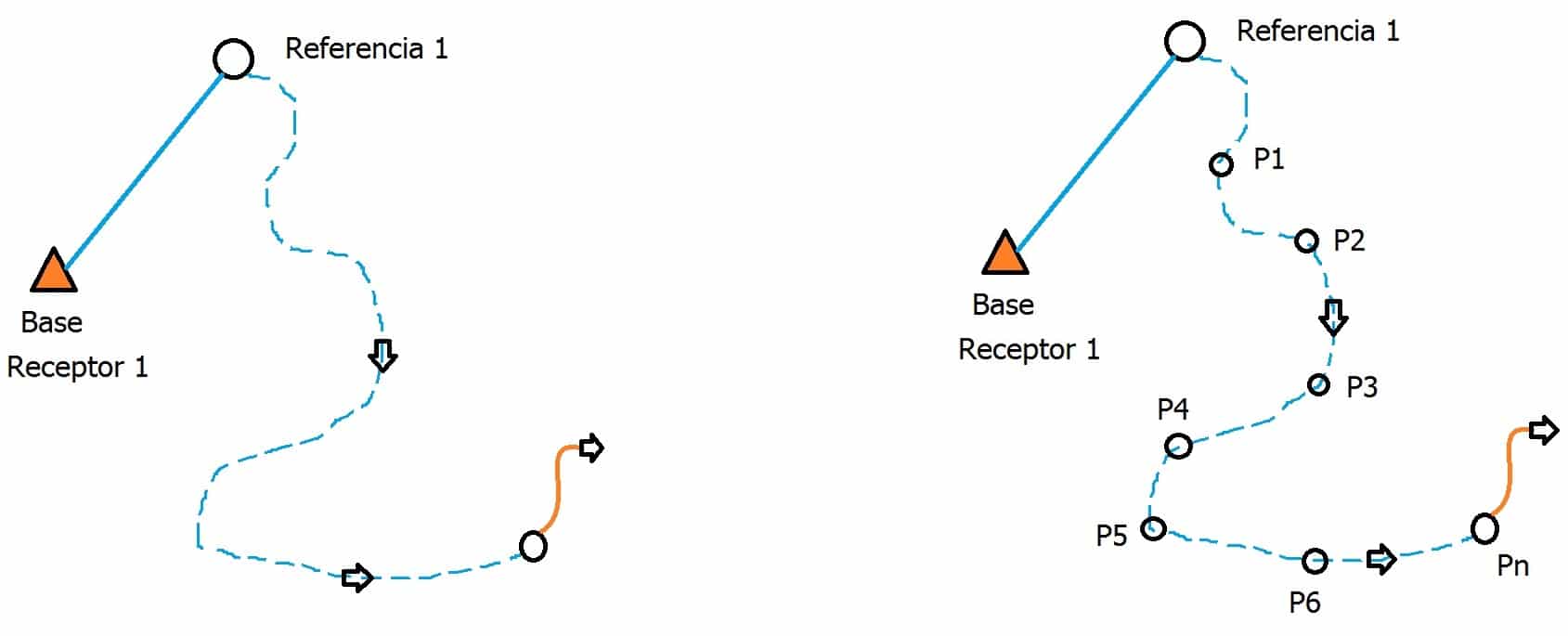
Posicionamiento relativo cinemático
Se utiliza comúnmente para el levantamiento de detalles, por su eficiencia a la hora de medir muchos puntos que están cerca unos de otros. Presenta la desventaja que si se presentan obstrucciones o se pierde el rastreo de menos de 4 satélites se debe inicializar el equipo.
Este método requiere de dos receptores que se deben inicializar al principio del levantamiento.
Una forma de inicializar es teniendo una línea base conocida, cuyos puntos de origen y final serán ocupados por los receptores para realizar una observación estática rápida simultánea con un tiempo de rastreo de entre 5 a 20 minutos, dependiendo de la longitud de la línea base. Este proceso permite determinar las diferencias de las observaciones de la línea base que por consiguiente arrojará, las ambigüedades desconocidas del ciclo por medio de un post-procesamiento.
El cambio de antena es otra forma de inicializar los receptores. En este caso se dispone de dos receptores, un receptor se ubica en un vértice base con coordenadas conocidas y el otro receptor se ubica en un vértice cercano, después de algunos minutos de rastreo se intercambian las antenas en los vértices de la línea sin que los receptores se apaguen. Se recomienda que en todo momento los receptores mantengan el rastreo de la señal de mínimo 4 satélites. Luego se vuelve a intercambiar los receptores a los vértices de inicio, lo que permitirá determinar las diferencias de coordenadas de la línea base y la ambigüedad del ciclo.
La tercera forma de inicializar los receptores es por medio de la resolución de ambigüedades ultra-rápidas (OTF on the fly). En esta técnica no se requiere realizar la inicialización al empezar el levantamiento ni cuando se pierda la condición de rastreo de mínimo 4 satélites, debido a que se utiliza un algoritmo matemático complejo y se aplica a la medición en el postproceso. Esto lo logra porque el receptor reconoce la pérdida de señal y vuelve a iniciar automáticamente al momento de alcanzar las condiciones ideales de recepción de señales.
Luego de la inicialización de los receptores, el receptor base debe permanecer en el vértice de coordenadas conocidas y el segundo receptor se desplazará libremente a lo largo de una línea o a los vértices de coordenadas desconocidas.
El operador del receptor móvil puede registrar las coordenadas a intervalos de tiempo definido o marcando los puntos de interés para el levantamiento.
En este método todos los receptores deben mantener recepción de las señales de por los menos 4 satélites de manera continua. En caso, que no se mantenga esta condición se debe volver a reinicializar los receptores o ubicarse en una posición donde se vuelva a tener la condición.
Una recomendación para disminuir la pérdida de señales a los 4 satélites, es realizar una planeación cuidadosa de la ubicación de los vértices para que NO se presenten obstrucciones dentro de la máscara de observación. Al finalizar el levantamiento se recomienda regresar al vértice inicial para verificar las coordenadas.
Este tipo de métodos es recomendable para levantamientos de muchos vértices, o donde exista un desplazamiento de los vértices como es el caso de los levantamientos batimétricos, seguimiento a la aeronave de un levantamiento fotogramétricos, control de maquinaria en el movimiento de tierras, construcción de vías, entre otros.
El levantamiento Stop and Go es una adaptación del método relativo cinemático y consiste en detenerse algunas épocas de datos en cada vértice, al cual se define un identificador para reconocer el vértice en los datos recolectados. Se debe procurar mantener en todo momento la recepción de señal de 4 satélites durante toda la sesión de rastreo y determinar con anterioridad la ambigüedad del ciclo. También se debe sincronizar la velocidad de la época del receptor base y del receptor móvil preferiblemente a 1 segundo.
Posicionamiento cinemático en tiempo real RTK
Este método tiene la ventaja de que define la posición en tiempo real, eliminando los errores y las ambigüedades. Para la aplicación de este método se requiere de mínimo dos receptores que reciban las señales de manera simultánea. Ambos receptores deben contar con un radio modem con frecuencias UHF, que emite y recibe señales de radio. Este radio modem permite transferir correcciones al receptor móvil.
Los levantamientos GNSS con el método RTK se utiliza para:
- Levantamiento de detalles
- Estaqueo
- Replanteo
- Aplicaciones COGO
Para el método RTK se requiere que un receptor asuma el rol de base y este emitirá las correcciones al receptor móvil, quien a partir del software procesa las coordenadas y corregirá en tiempo real la posición.
Es el receptor móvil es quien se encarga de procesar los datos recibidos del receptor base y datos de los satélites, con los cuales se resuelven las ambigüedades que permiten obtener una posición muy precisa en tiempo real.
Una vez que el receptor base inicie la transmisión de datos se puede activar el receptor móvil y empezar con el proceso de inicio similar a proceso OTF pero en tiempo real. En ese momento ya las ambigüedades son resueltas y el receptor móvil puede registrar las coordenadas de los puntos.
La velocidad de época normalmente se configura para los dos receptores en 1 segundo. Es importante tomar en cuenta que NO todos los receptores tienen la capacidad de realizar posicionamiento cinemático en tiempo real RTK.
En este método los datos recibidos del receptor base en el receptor móvil tiene un retardo conocido como latencia de los datos. Esto se debe principalmente:
- Tiempo de trayectoria de la señal de radio.
- Retrasos
- Tiempo necesario para el cálculo de las correcciones en la estación base.
- Tiempo necesario para aplicar las correcciones en el receptor móvil.
Algo importante a tomar en cuenta es la distancia entre los dos receptores que debe ser menor a 10 km, ya que a partir de esta distancia se disminuye la intensidad de la señal de radio y por ende dificulta la aplicación del método.
Otra dificultad que presenta el método es la existencia de elementos que interfieren en la señal de radio, por ejemplo, una montaña, edificios muy masivos, entre otros. Lo anterior, se puede solucionar al incorporar una antena repetidora de la señal de radio que debe ser compatible con los dos receptores. La pérdida de señal de los datos del receptor base disminuye la precisión del levantamiento.
Con respecto a radioenlace en el método RTK, este puede ser afectado por la potencia del radio transmisor, ya que entre mayor potencia se refleja una mejor comunicación entre los receptores. Otro elemento que afecta la recepción de datos de corrección es la longitud del cable de la antena y el tipo de antena.
Entre las ventajas que presenta el método RTK está la reducción del tiempo de procesamiento en la oficina y la capacidad de verificar los resultados en campo. Se recomienda en este método estar pendiente que los valores GDOP no excedan los valores ideales para mantener la calidad del levantamiento.
Esta entrada tiene un comentario
Excelente contenido, muy academico. Existe alguna clasificacion para los equipos GNSS navegadores portatiles multiconstelacion e inclusive navegadores con frecuencia dualn ? Ojo, no hago referencia a los equipos de frecuencia dual del tipo diferencial (base + rover). Freddy Morales, Zulia, Veneuela.