El inicio del sistema de posicionamiento global se da en 1957, con el lanzamiento del satélite artificial Sputnik I. Es a partir de la determinación del corrimiento Doppler de las señales del satélite que fue posible determinar la órbita del satélite. En un proceso inverso se logró determinar la posición de un receptor sobre la superficie terrestre. En años posteriores, se logra mejorar y perfeccionar los métodos básicos de observaciones satelital.

Por otro lado, el sistema Transit inicia sus operaciones en 1964, basado en observaciones Doppler y apoyó muchos trabajos de tipo geodésico. Pero presentaba debilidades como:
- La afectación del campo de gravedad por la baja altura orbital.
- La señal era afectada por la refracción atmosférica debido a una baja frecuencia de emisión
- La baja cantidad de satélites de las constelaciones.
Es debido a estas debilidades que el sistema pierde eficacia y se crea el programa Navigation System Timing And Ranging, Global Positioning System NAVSTAR, este es el encargado de desarrollar y mantener GPS bajo el liderazgo del Departamento de Defensa de los Estados Unidos.
La finalidad de un sistema de posicionamiento global es determinar coordenadas espaciales de un punto, con respecto a un sistema de referencia terrestre internacional ITRS.
Los Sistemas de posicionamiento Global son útiles para el desarrollo de la agricultura tecnificada, levantamientos topográficos, catastro, gestión del riesgo, salvamento, ordenamiento territorial, navegación, dinámicas comerciales, entre otros.

Para lograr definir la posición de un punto sobre la tierra utilizando un receptor GPS, es necesario la recepción de señales de mínimo 4 satélites. Estas señales son emitidas por los satélites que orbitan alrededor de la Tierra y son recibidas por el receptor.
Los receptores permiten realizar recolección de datos lo que se denomina planteo y también permiten realizar la ubicación de puntos con coordenadas conocidas, lo que se conoce como replanteo.
En los sistemas de posicionamiento global, el tiempo juega un papel muy importante, ya que en función del tiempo es que se define la posición de un punto en el espacio. Para comprender el concepto de tiempo debemos definir la unidad patrón, la cual es el segundo.
Un segundo es el periodo que transcurre la partícula del electrón de isotopo de cesio 133 en concluir 9 192 631 770 ciclos de radiación. Para poder determinar el segundo se requieren utilizar relojes muy precisos denominados relojes atómicos. Estos relojes atómicos se encuentran en los satélites y en las estaciones de monitoreo del sistema de posicionamiento global. El tiempo que definen los relojes atómicos del GPS coincide con el Tiempo Universal Coordinado, el cual es ponderado en la estación maestra.

Los sistemas de posicionamiento global están constituidos por tres segmentos que son:
- Segmento espacial
- Segmento de Control
- Segmento de usuario

Segmento Espacial
El segmento espacial está conformado por los satélites que giran en órbitas alrededor de la Tierra. La conformación de satélites en órbitas se llaman constelaciones. Cada satélite se traslada en el espacio siguiendo las leyes de la mecánica celeste.
Es por ello necesario definir el concepto de efeméride, el cual se refiere a parámetros orbitales que permiten determinar la posición del satélite en el espacio.
Las efemérides transmitidas son los datos recibidos desde el satélite, que previamente fueron enviados a este desde la estación maestra, mientras que las efemérides precisas son los datos procesados posteriormente, que junto con los datos de las estaciones de monitoreo permiten mejorar en gran medida la posición definida por el receptor.
Dentro de las efemérides encontramos el semieje mayor y semieje menor de la órbita, altura del satélite, periodo de traslación, sistema de coordenadas cartesianas, perigeo, apogeo, excentricidad, inclinación de la órbita, nodo ascendente, ascensión recta del nodo ascendente, argumento del perigeo, anomalía verdadera, velocidad del satélite, entre otros.
Otro de los elementos que se encuentran dentro del segmento espacial son las señales emitidas por los satélites, donde sobresalen las ondas y los códigos. Los relojes atómicos del satélite operan en una frecuencia fundamental de 10.23 MHz.
Los satélites emiten ondas portadoras que viajan a la velocidad de la luz y son moduladas por los códigos. Los códigos permiten distinguir al satélite emisor de la señal y permiten calcular la seudodistancia, fundamental para el cálculo de una posición precisa.
La forma de identificar el satélite emisor de la señal es por medio del Ruido Seudo Aleatorio (PRN Pseudo Random Noise) el cual caracteriza e identifica singularmente al satélite.
Segmento Control
El segmento control está conformado por la estación maestra, estación de monitoreo y antenas terrestres. El segmento control da seguimiento a los satélites, define la posición en la órbita, calibra y sincroniza los relojes atómicos del sistema. Esto permite que los elementos del segmento control transmitan las efemérides para cada satélite en particular, además, suministran datos meteorológicos y coordenadas de las estaciones, ubicación de los satélites en tiempo real y en cada instante.
A partir de las efemérides, la estación maestra define la existencia de errores y correcciones para obtener coordenadas precisas, estas correcciones son cargadas a los satélites para que sean recibidas por los receptores.
Las estaciones de monitoreo tienen la función de determinar la distancia a los satélites visibles y datos meteorológicos, que son transmitidas a la estación maestra.
Segmento Usuario
El segmento usuario lo constituyen el receptor, que está compuesto por una antena y un microprocesador. La antena está conectada al microprocesador y las coordenadas obtenidas están referidas al centro radiológico de la antena. Por ello es importante, en el momento de realizar el levantamiento, definir la altura de la antena para determinar las coordenadas sobre el terreno.
El microprocesador tiene múltiples canales, que reciben las señales emitidas por el segmento espacial y el segmento de control, estas señales son almacenadas en la memoria del receptor. Adicionalmente el receptor posee un reloj que permite sincronizar el tiempo de los satélites con respecto al tiempo del receptor.
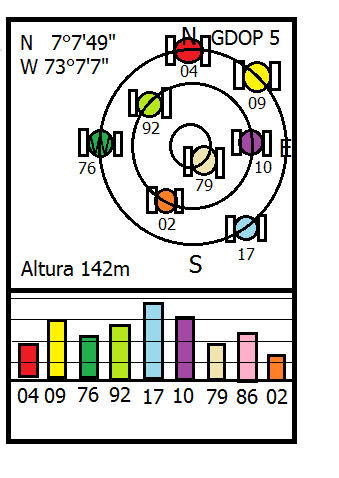
La información que describen los receptores es:
- Los satélites localizados
- Los satélites en seguimiento
- Intensidad de la señal
- Condición de cada satélite
- Posición
- Calidad geométrica GDOP
El Problema de la Pirámide
El problema de la pirámide busca resolver las medidas con GPS y consiste en tener tres satélites y un punto sobre la tierra. Se debe determinar la distancia entre el punto sobre la Tierra y el satélite, esta distancia será el radio de una esfera. La convergencia de las tres esferas en un punto común sería la ubicación del punto sobre la superficie terrestre.
La Seudodistancia
La distancia determinada entre el satélite y el punto en la Tierra se llama seudodistancia y es una distancia calculada indirectamente, a partir del desfase de tiempos entre los relojes del satélite y el reloj del receptor, las características de las señales y las características del medio de transmisión de las señales.
El cálculo de la distancia obedece a la ecuación Distancia=VelocidadxTiempo
La velocidad en los sistemas de posicionamiento global está vinculada a las señales de radio que viajan a la velocidad de la luz equivalente a 299 792 458 m/s.
El tiempo es el necesario para que la señal logre llegar del satélite al receptor. El tiempo que tarda la señal en llegar del satélite al receptor se define por la comparación en el desfase entre el código C/A del satélite y el código C/A generado por el receptor, lo cual permite calcular el tiempo.

La señal emitida de un satélite es el producto de la multiplicación del código por la onda portadora. De lo anterior, se reconoce que cada satélite genera una señal particular a cada satélite, lo que se traduce en un ruido seudoaleatorio PRN distintivo para cada satélite. El tiempo debe ser común para todo el sistema, por lo tanto, las repeticiones del tiempo deben ser sincronizadas para todo el sistema.
En el proceso del cálculo de la seudodistancia aparece una diferencia de tiempo entre el tiempo del receptor y el tiempo del sistema. Las variables contempladas en el cálculo de la seudodistancia presentan cuatro incógnitas que son x, y, z y el error del tiempo del receptor.
Para ello vemos:
Seudo distancia = Desfase de códigos + error de tiempo
Es por ello necesario tener observaciones de 4 satélites para resolver el sistema de 4 ecuaciones y 4 incógnitas.
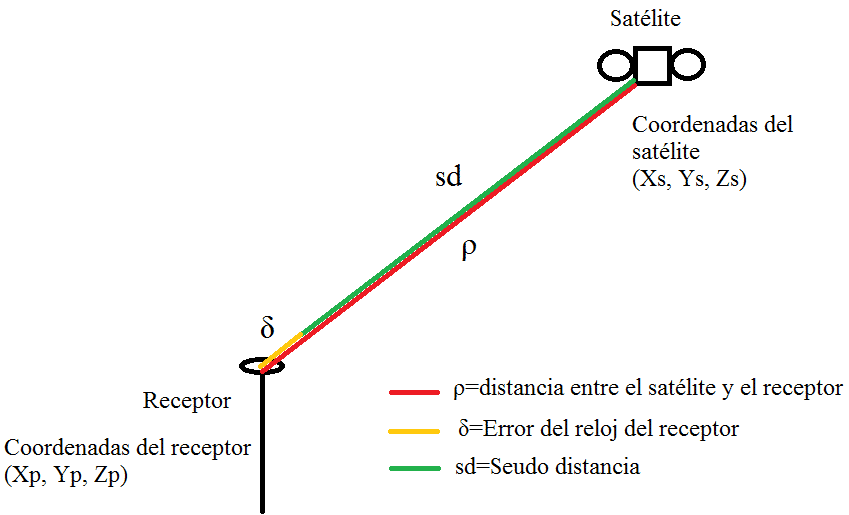
La Ecuación de Observación
Para comprender la ecuación de observación requerida para determinar las coordenadas del receptor, es necesario identificar la distancia entre el satélite y el receptor, la cual es igual a la seudodistancia más el error del reloj del receptor.
Dada por la siguiente fórmula:
ρ=sd+δd
Donde:
- ρ= distancia entre el satélite y el receptor
- sd= Seudo distancia
- δd= Error del reloj del receptor.
Entonces para cada satélite se tendrá la siguiente ecuación para definir la distancia entre el satélite y el receptor.
ρ²=(Xs-Xp)²+(Ys-Yp) ²+(Zs-Zp)²
- δd= c*(-δr)
- c= velocidad de la luz
La Precisión de Posición
La precisión de posición está dada por la siguiente ecuación:
sd=dobs- ∑e
Donde ∑e es la sumatoria de los errores involucrados en la recolección de datos.
Para cada uno de las coordenadas X, Y, Z se tiene:
Xs=Xt-eXt
Ys=Yt-eYt
Zs=Zt-eZt
Donde Xt, Yt, Zt son coordenadas trasmitidas
Donde eXt, eYt, eZt son los errores vinculados a las coordenadas X,Y,Z
Se sustituyen los valores en la ecuación
(dobs-∑e+δd) ²=(Xt-eXt-Xp)²+(Yt-eYt-Yp) ²+( Zt-eZt-Zp)²
Para comprender los errores producto de las observaciones con receptores GPS se debe contemplar la teoría de los errores, desde lo cual, se contempla errores sistemáticos y errores aleatorios, los cuales se comportan como una campana de Gauss. Se debe recordar que los errores accidentales son imposibles de corregir. Para disminuir los errores en las observaciones con GPS es conveniente siempre recolectar una abundancia considerable de datos.

Los errores sistemáticos se deben en gran medida a las ondas reflejadas, influencia de la atmósfera, efemérides y datos del reloj del satélite.
Error por Ondas Reflejadas
Este error es conocido también como error de multitrayectoria o multipath. Es producto del desvío de la señal hacia objetos con una superficie reflejante, como es el caso de vidrios de edificios, superficies metálicas o espejos de agua. En este error la señal de los satélites GNSS muestra una trayectoria reflejada, lo cual hace que la distancia calculada por el receptor no sea la correcta. Es un error aleatorio.
La manera de disminuir el error es por medio del uso de antenas terrestres y algoritmos cargados dentro del receptor, que permiten detectar la multitrayectoria, filtrando la señal y mejorando la posición.

Errores Atmosféricos
Estos errores son sistemáticos y se dividen en error ionosférico y error troposférico.
Error Ionosférico:
El error Ionosférico es variable en el tiempo, depende del lugar del levantamiento y a la época del año. Está relacionado a los ciclos solares y a la posición del Sol. Este error muestra un aumento en su magnitud en función a la cercanía a los polos. También varía de acuerdo con la frecuencia de la señal del espectro radioeléctrico.
La forma de reducir este error es por medio del uso de receptores de doble frecuencia. Para reducir este error es recomendable procurar que la distancia entre la base y el rover sea menor a 10 km, debido a que muestra un comportamiento exponencial en función de la distancia entre receptores.

Error troposférico:
El error troposférico se comporta en función de la altura sobre el nivel del mar, la temperatura, la presión atmosférica y la humedad relativa. Para disminuir este error es necesario la creación y empleo de modelos troposféricos teóricos.

Error en las Orbitas del Satélite
El error en las órbitas del satélite es un error sistemático. Se debe reconocer que las órbitas de los satélites GNSS son continuamente controladas por el segmento de control. Este segmento predice y transmite a los satélites información de la posición de cada elemento del sistema. Los satélites a su vez transmiten esta información a los usuarios por medio del mensaje de navegación (efemérides transmitidas).
A pesar del continuo control que se ejerce sobre el sistema, existen irregularidades en las órbitas provocadas por varios factores, como un mal funcionamiento del satélite, falta de homogeneidad de la gravedad terrestre, efectos de la fuerza de atracción de la Tierra y la Luna.
La forma de disminuir el error provocado por las órbitas del satélite es por medio del uso de efemérides precisas y aplicando un postproceso de los datos del levantamiento. Las efemérides precisas se pueden obtener el sitio https://www.igs.org

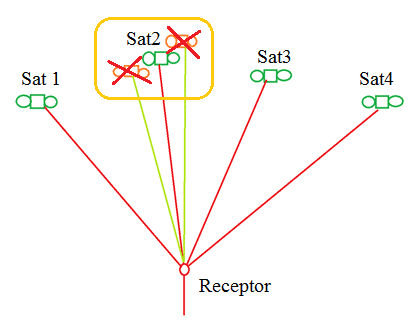
Error de geometría básica GDOP
El error de la geometría básica es llamado disolución de precisión geométrica (geometric dilution of precision GDOP), y se presenta porque los receptores escogen automáticamente los satélites que tienen mejores condiciones para realizar las mediciones, pero muchas veces esa escogencia que realiza no es la correcta.
En algunos casos los satélites escogidos se encuentran muy juntos y los círculos de intersección reflejan ángulos muy pequeños. Teóricamente los satélites deben estar ubicados en una configuración geométrica uniforme sobre la máscara de observación en el hemisferio visible.
Se recomienda que los valores del GDOP para un levantamiento con receptores GPS sea inferior a 5, lo que representa que la configuración de los satélites en la constelación es de buena calidad.
Se puede hablar de HDOP para error de posicionamiento horizontal, VDOP para error en posicionamiento vertical y PDOP para error en posicionamiento tridimensional.